Using the arm
Setting up the arm on the servo
The servo motor used to attach the arm on the XRP has about 200 degrees of rotation and can move to a desired position using internal sensors. When attaching the arm to the servo, it is important that one end of its range is with the arm relatively horizontal inside the robot chassis and the other end of the rotation outside the back of the robot for picking up objects. The full range of arm rotation is shown in the two images below.


To position the arm correctly, install it in any position and use it to rotate the servo to the full clockwise direction, as seen in the top photo. Then reinstall the arm so that it is in the shown position. Then the software will be able to move it to any position in between the two photos above.
Moving the arm under program control
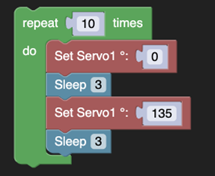
Use the servo class to move the servo motor to the desired position. The method set_angle() sets the servo position to the desired angle. Below is an example program that moves the servo position from one end of its motion to the other.

When the servo is controlled from the program, it is held in the position it was last set to. To free it, that is to allow it to be moved by hand, the free() function may be called, and the program will stop sending the position signal to the servo.