Sensing the environment

Measuring the distance to an object
The XRP includes an ultrasonic rangefinder that can measure the distance to objects in front of it. The sensor has two transducers; one acts as a speaker, and the other acts as a microphone. It does it by sending a burst of ultrasonic sound out of the speaker that hits an object in front of the robot. The sound reflects off the object back to the sensor and is captured by the microphone. The time for that round trip determines the distance to the object. Understanding how well the sound reflects off various objects of different sizes, profiles, and materials is important for using the sensor. A good exercise is to test the sensor by printing returned values at various distances from any object you want the robot to detect.

Nota
It is important to wire the sensor correctly, as described in the assembly instructions, to ensure it works properly. Interchanging the trigger and echo wires is a common error using that part.
XRPLib has a rangefinder class that takes care of the sending and receiving signals to the sensor. All the program has to do is request the distance, and the library returns it. There is a single method called distance() that returns the distance to the nearest object in centimeters. The range of operation is from 2cm to 4m.
Example use of the rangefinder
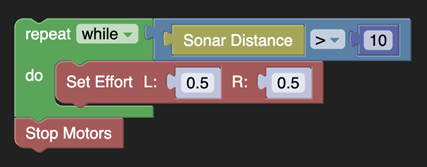
The following program drives the XRP forwards until the code detects an object within 10cm of the ultrasonic rangefinder. Then it stops.
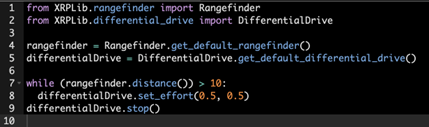
This program stops the motors when the object is detected. A better way of solving the same problem might be to use proportional or PID control to gradually bring the robot to a stop to avoid overshoot, where inertia might carry the robot beyond the 10cm set point before it comes to rest.
Following lines


A reflectance sensor that can be used for line following is included with the XRP. It has two pairs of LEDs and light sensors. The LEDs emit infrared light that reflects off the driving surface. The light sensor measure the reflected light intensity, which depends on the surface below the sensor. Electrical tape is typically used to make a line that the robot can follow and has a different reflectivity than the surface, usually a whiteboard or tabletop. With a pair of sensors, the robot can read the reflectance value and tell where it is relative to the taped line.
The class reflectance has methods get_right() to retrieve the right reflectance value and get_left() to retrieve the left reflectance value. The reflectance ranges from 0 (white) to 1 (black).
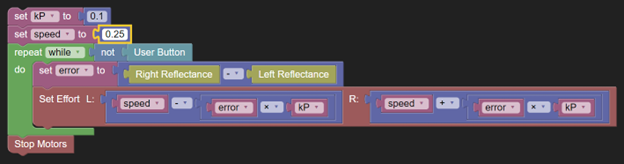
Line following example program
The following program uses proportional control with the line sensors to follow a line across the driving surface for the robot. The Kp variable sets the gain for the controller.